题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
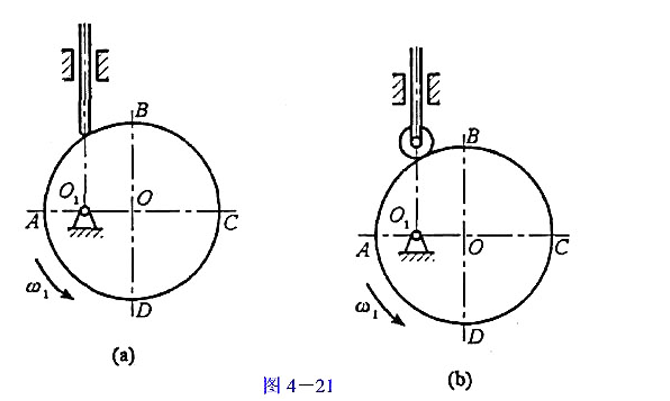
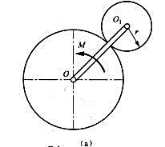
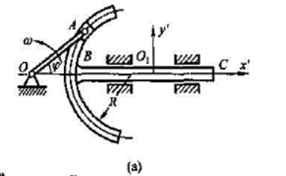
在图(a)所示机构中,圆盘绕其中心O1以匀角速度ω1=3rad/s转动。当圆盘转动时,通过圆盘上的销子M1带动T型导杆沿
在图(a)所示机构中,圆盘绕其中心O1以匀角速度ω1=3rad/s转动。当圆盘转动时,通过圆盘上的销子M1带动T型导杆沿水平往复运动。同时,在导杆AB上有一销子M2带动O2E杆绕O2轴摆动。已知:r=20cm,l=30cm。在图示位置时,θ=φ=30°。试用点的复合运动方法,求该瞬时O2E杆的角速度ω2和角加速度α2。
查看答案

 如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案

 更多“在图(a)所示机构中,圆盘绕其中心O1以匀角速度ω1=3ra…”相关的问题
更多“在图(a)所示机构中,圆盘绕其中心O1以匀角速度ω1=3ra…”相关的问题