题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
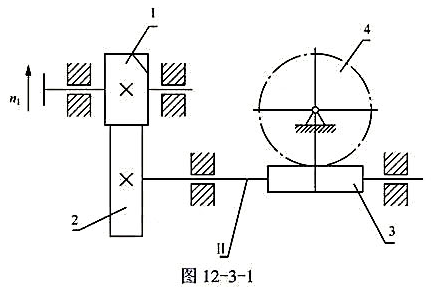
如图12-3-1所示传动系统,主动齿轮1的转动方向n1和螺旋角旋向如图12-3-1所示,为使Ⅱ轴所受的
轴向力较小;
(1)试安排齿轮2的螺旋角旋向和蜗杆3的导程角旋向(用文字说明旋向并在图中画出);
(2)标出齿轮2和蜗杆3上的啮合点的三个分力的方向;
(3)标出蜗轮的转向并说明蜗轮的螺旋角旋向。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
(1)试安排齿轮2的螺旋角旋向和蜗杆3的导程角旋向(用文字说明旋向并在图中画出);
(2)标出齿轮2和蜗杆3上的啮合点的三个分力的方向;
(3)标出蜗轮的转向并说明蜗轮的螺旋角旋向。
如果结果不匹配,请 联系老师 获取答案
 更多“如图12-3-1所示传动系统,主动齿轮1的转动方向n1和螺旋…”相关的问题
更多“如图12-3-1所示传动系统,主动齿轮1的转动方向n1和螺旋…”相关的问题
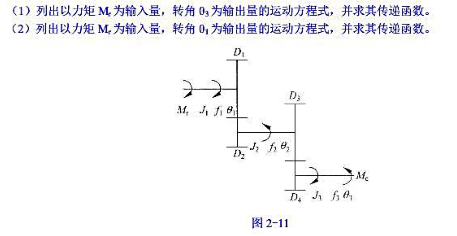
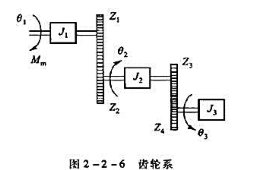
一齿轮系如图2-2-6所示,其中Z1、Z2、Z3和Z4分别为齿轮的齿数,J1、J2、J3表示各传动轴上的转动惯量,θ1、θ2和θ3为各轴的转角,Mm是电动机输出的转矩。试列写折算到电动机轴上的齿轮系运动方程。
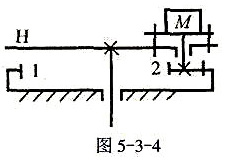
如图5-3-4所示的液压回转台传动机构中,已知z2=15,油马达M的转速nM=12r/min(注:油马达装在回转台上),回转台H的转速nH=1.5r/min。求齿轮1的齿数。
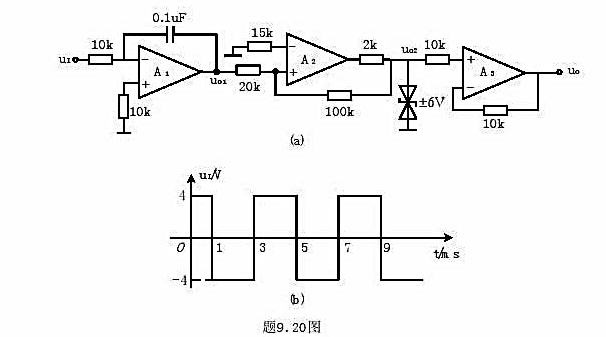
题9.20图(a)所示电路中,输入电压ur的波形如图(b)所示,已知电容的初始电压为零。(1)指出A1、A2、A3各组成何种电路;(2)画出各输出电压u01、u02和u0的波形,标出有关电压值。
控制系统如图4-29所示,其中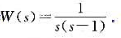
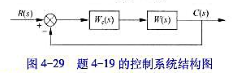
(1)当Wc=kg时,由所绘制的根轨迹证明系统总是不稳定的。
(2)当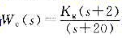 时,绘制系统的根轨迹,并确定使系统稳定的Kg值范围。
时,绘制系统的根轨迹,并确定使系统稳定的Kg值范围。
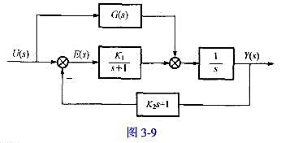
已知系统结构图如图3-9所示:
(1)欲使系统闭环极点配置在-3+j4, -3-j4处,试求K1和K2的值;
(2)设计G(s),使阶跃作用u(t)下稳态误差为零。
电路如图P4.6所示,具有理想的对称性.设各管β均相同.
(1)说明电路中各晶体管的作用;(2)若输入差模电压为(u11-u12)产生的差模电流为ΔiD,则电路的电流放大倍数 ?
?