 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
系统的单位阶跃响应为y(t)=1-e-2t+2te-2t,则系统的单位脉冲响应是()。
A.y(t)=δ(t)+4e-2t-4te-2t
B.y(t)=4e-2t-4te-2t
C.y(t)=-e-2t+4te-2t
D.y(t)=-e-2t+2te-2t
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
A.y(t)=δ(t)+4e-2t-4te-2t
B.y(t)=4e-2t-4te-2t
C.y(t)=-e-2t+4te-2t
D.y(t)=-e-2t+2te-2t
如果结果不匹配,请 联系老师 获取答案
 更多“系统的单位阶跃响应为y(t)=1-e-2t+2te-2t,则…”相关的问题
更多“系统的单位阶跃响应为y(t)=1-e-2t+2te-2t,则…”相关的问题
某个实际测量系统(LTI系统)的单位阶跃响应 为系统的时间常数.显然,它不能瞬时响应被检测信号的变化.试设计一个补偿系统,使得原测量系统与它级联后的输出信号,能对被检测信号做出瞬时的响应,即能准确地表示被检测信号.请给出你设计的补偿系统的特性(单位冲激响应或频率响应).
为系统的时间常数.显然,它不能瞬时响应被检测信号的变化.试设计一个补偿系统,使得原测量系统与它级联后的输出信号,能对被检测信号做出瞬时的响应,即能准确地表示被检测信号.请给出你设计的补偿系统的特性(单位冲激响应或频率响应).
有一系统对激励为 时的完全响应为
时的完全响应为 ,对激励为e2(t)=δ(t)时的完全响应为r2(t)=δ(t).
,对激励为e2(t)=δ(t)时的完全响应为r2(t)=δ(t).
(1)求该系统的零输入响应 ;
;
(2)系统的起始状态保持不变,求其对于激励为 的完全响应r3(t).
的完全响应r3(t).
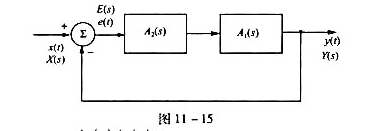
定,并使误差信号e(t)=x(t)-y(t)随时间增长而衰减到零.
(1)若 a为正实系数.选A2(s)=K(比例控制,K为实系数).求为使系统稳定K值应满足何种条件.分别求r(t)为单位冲激或单位阶跃时,误差信号e(t)的终值
a为正实系数.选A2(s)=K(比例控制,K为实系数).求为使系统稳定K值应满足何种条件.分别求r(t)为单位冲激或单位阶跃时,误差信号e(t)的终值 .(借助拉氏变换的终值定理.)
.(借助拉氏变换的终值定理.)
(2)若A1(s)仍如(1)问,而A2(s)改为比例积分(PI)控制 .为使系统稳定,求实系数K1、K2的范围.求x(t)为单位阶跃时误差信号e(t)的终值.比较以上二种情况下系统的跟踪性能.
.为使系统稳定,求实系数K1、K2的范围.求x(t)为单位阶跃时误差信号e(t)的终值.比较以上二种情况下系统的跟踪性能.
(3)若 试讨论若A2(s)为PI控制时系统不稳定,而改用比例-积分-微分(PID)控制时
试讨论若A2(s)为PI控制时系统不稳定,而改用比例-积分-微分(PID)控制时 可使系统稳定.并讨论系统对阶跃信号作用的跟踪性能,求e(t)的终值.
可使系统稳定.并讨论系统对阶跃信号作用的跟踪性能,求e(t)的终值.
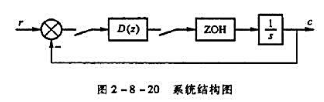
系统的结构图如图2-8-20所示,采样周期T=1s, 试设计控制器的脉冲传递函数D(z),使该系统在输入为单位阶跃信号时,输出满足以下条件:c(0)=0,c(k)=1,k>0,其中k为正整数。
已知离散系统差分方程表示式

(1)求系统函数和单位样值响应;
(2)若系统的零状态响应为 ,求激励信号x(n);
,求激励信号x(n);
(3)画系统函数的零、极点分布图;
(4)粗略画出幅频响应特性曲线;
(5)画系统的结构框图.
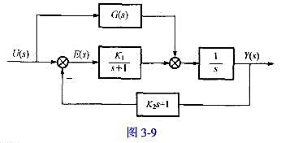
已知系统结构图如图3-9所示:
(1)欲使系统闭环极点配置在-3+j4, -3-j4处,试求K1和K2的值;
(2)设计G(s),使阶跃作用u(t)下稳态误差为零。
一个单位负反馈系统的开环对数辐频渐近特性曲线如图2-5-39所示,要求:

①写出系统开环传递函数;
②判断闭环系统的稳定性;
③将幅频向右平移10倍频程,试讨论对系统阶跃响应的影响。







 ,零状态响应为
,零状态响应为 求此系统的冲激响应h(t).
求此系统的冲激响应h(t).








