题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
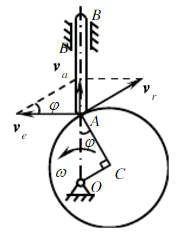
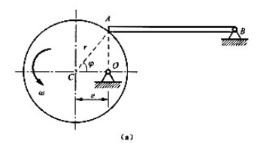
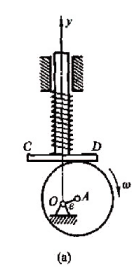
偏心凸轮的偏心距OC=e,轮半径,以匀角速度ω0绕轴O转动。在题3—6图所示位置时,OC⊥CA。试求从动杆的速
偏心凸轮的偏心距OC=e,轮半径
 ,以匀角速度ω0绕轴O转动。在题3—6图所示位置时,OC⊥CA。试求从动杆的速度。
,以匀角速度ω0绕轴O转动。在题3—6图所示位置时,OC⊥CA。试求从动杆的速度。

查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
偏心凸轮的偏心距OC=e,轮半径
,以匀角速度ω0绕轴O转动。在题3—6图所示位置时,OC⊥CA。试求从动杆的速度。
如果结果不匹配,请 联系老师 获取答案
 更多“偏心凸轮的偏心距OC=e,轮半径,以匀角速度ω0绕轴O转动。…”相关的问题
更多“偏心凸轮的偏心距OC=e,轮半径,以匀角速度ω0绕轴O转动。…”相关的问题
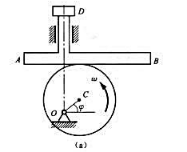
题8-13图(a)所示半径为R的偏心轮以匀角速度w绕O轴转动,推动导板ABD沿铅垂轨道作平移。已知偏心距OC=e,开始时OC沿水平线。若在导板顶部D处放有一质量为m的物块。试求:
(1)导板对物体的最大约束反力及此时偏心C的位置。
(2)欲使物块不离开导板角速度w的最大值。
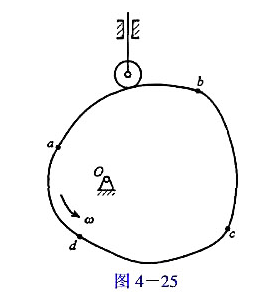
在图4-25所示凸轮机构中,已知凸轮以角速度ω逆时针方向转动,令凸轮的基圆半径以r0表示,行程以h表示,偏心距以e表示,压力角以a表示,推杆位移以s表示,凸轮的推程运动角δ0表示,回程运动角δ´0以表示,远休止角以δ´8表示,近休止角以δ´8表示,a为实际廓线推程起始点,b为实际廓线推程终止点,c为实际廓线回程起始点,d为实际廓线回程终止点.试作图表示:
(1)凸轮的基圆并标注其基圆半径r0;
(2)推杆的行程h;
(3)当前位置时的压力角α和位移s;
(4)凸轮的偏心距e;
(5)凸轮的推程运动角δ0、回程运动角δ´0、远休止角δ´8和近休止角δ´8.
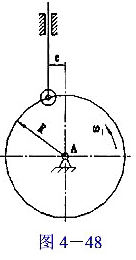
设计一偏置直动滚子从动件盘形凸轮机构,凸轮回转方向及动件初始位置如图4-48所示,已知:偏距e=5mm,基圆半径R=20mm,滚子半径rT=5mm,升程h=15mm,从动件运动规律:升程运动角φ=180°从动件以等加速等减速运动上升,远休止角φ8=30°,回程运动角φ´=120°从动件以等速运动至最低点,近休止角φ´s=30°,试:
(1)绘出从动件位移线图;
(2)绘出凸轮实际轮廓曲线.
A.规格:08-15;柄长130-170 mm;颈干角 132°;垂直偏距:27-31 mm;偏心距:38-44 mm
B.规格:09-15;柄长125-165 mm;颈干角 132°;垂直偏距:27-31 mm;偏心距:38-44 mm
C.规格:09-15;柄长130-165 mm;颈干角 132°;垂直偏距:27-31 mm;偏心距:38-44 mm
D.规格:08-15;柄长125-165 mm;颈干角 130°;垂直偏距:27-31 mm;偏心距:38-44 mm