如果结果不匹配,请
如果结果不匹配,请 
 更多“计划系数K1为1.0,操作系数K2为0.85,问推焦总系数是…”相关的问题
更多“计划系数K1为1.0,操作系数K2为0.85,问推焦总系数是…”相关的问题
第2题
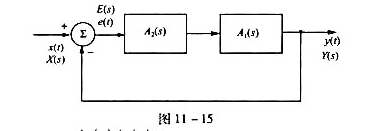
在图11-15所示的跟踪系统中A2(s)作为补偿器用来改善A3(s)的性能.其作用是保证系统稳
在图11-15所示的跟踪系统中A2(s)作为补偿器用来改善A3(s)的性能.其作用是保证系统稳
点击查看答案
定,并使误差信号e(t)=x(t)-y(t)随时间增长而衰减到零.
(1)若 a为正实系数.选A2(s)=K(比例控制,K为实系数).求为使系统稳定K值应满足何种条件.分别求r(t)为单位冲激或单位阶跃时,误差信号e(t)的终值
a为正实系数.选A2(s)=K(比例控制,K为实系数).求为使系统稳定K值应满足何种条件.分别求r(t)为单位冲激或单位阶跃时,误差信号e(t)的终值 .(借助拉氏变换的终值定理.)
.(借助拉氏变换的终值定理.)
(2)若A1(s)仍如(1)问,而A2(s)改为比例积分(PI)控制 .为使系统稳定,求实系数K1、K2的范围.求x(t)为单位阶跃时误差信号e(t)的终值.比较以上二种情况下系统的跟踪性能.
.为使系统稳定,求实系数K1、K2的范围.求x(t)为单位阶跃时误差信号e(t)的终值.比较以上二种情况下系统的跟踪性能.
(3)若 试讨论若A2(s)为PI控制时系统不稳定,而改用比例-积分-微分(PID)控制时
试讨论若A2(s)为PI控制时系统不稳定,而改用比例-积分-微分(PID)控制时 可使系统稳定.并讨论系统对阶跃信号作用的跟踪性能,求e(t)的终值.
可使系统稳定.并讨论系统对阶跃信号作用的跟踪性能,求e(t)的终值.
第8题
基元反应的速率系数k=1.0×10-2L-1·mol.g.c1=0.20mol·L-1,ca=0.30mo
基元反应 的速率系数k=1.0×10-2L-1·mol.g.c1=0.20mol·L-1,ca=0.30mol·L-1,cz=0.10mol·L-1时,则此时的反应速率为()
的速率系数k=1.0×10-2L-1·mol.g.c1=0.20mol·L-1,ca=0.30mol·L-1,cz=0.10mol·L-1时,则此时的反应速率为()
A、1.2×10-7mol·L-1·s-1
B、6.0×107mol·L-1·s-1
C、1.2×10-8mol·L-1·s-1
D、6.0×108mol·L-1·s-1
第9题
某独立基础,埋深1.0m,若采用C20素混凝土桩复合地基,桩间土承载力特征值为80kPa,按照《建筑地基处理技术规范》(JG]79-2012),桩土应力比的最大值接近下列哪个数值?(单桩承载力发挥系数、桩间土承载力发挥系数均为1.0)()
A.30
B.60
C.80
D.125
第10题
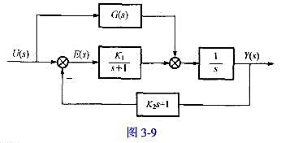
已知系统结构图如图3-9所示:(1)欲使系统闭环极点配置在-3+j4, -3-j4处,试求K1</sub>和K2</sub>的
已知系统结构图如图3-9所示:
(1)欲使系统闭环极点配置在-3+j4, -3-j4处,试求K1和K2的值;
(2)设计G(s),使阶跃作用u(t)下稳态误差为零。