题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
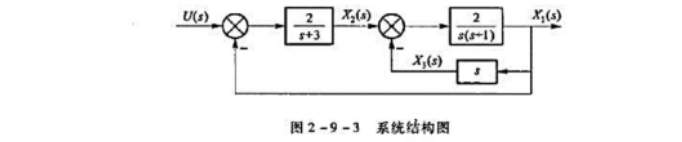
某最小相位系统结构如图6-7(a)所示,G0(s)为受控对象的传递函数,图6-7(b)所示为该系统的开
某最小相位系统结构如图6-7(a)所示,G0(s)为受控对象的传递函数,图6-7(b)所示为该系统的开环对数幅频特性渐近线。试求:
(1)写出开环传递函数;
(2)计算该控制系统的相角裕量;
(3)写出串联校正装置的传递函数Gc(s),说明是什么型式的校正。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
某最小相位系统结构如图6-7(a)所示,G0(s)为受控对象的传递函数,图6-7(b)所示为该系统的开环对数幅频特性渐近线。试求:
(1)写出开环传递函数;
(2)计算该控制系统的相角裕量;
(3)写出串联校正装置的传递函数Gc(s),说明是什么型式的校正。
如果结果不匹配,请 联系老师 获取答案
 更多“某最小相位系统结构如图6-7(a)所示,G0(s)为受控对象…”相关的问题
更多“某最小相位系统结构如图6-7(a)所示,G0(s)为受控对象…”相关的问题
列写出如图2-9-3所示系统的状态方程表达式(取图中X1、X2和X3作为状态变最),并试确定该系统是否完全可控和完全可观测。
控制系统如图4-29所示,其中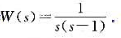
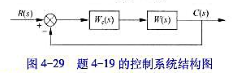
(1)当Wc=kg时,由所绘制的根轨迹证明系统总是不稳定的。
(2)当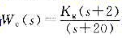 时,绘制系统的根轨迹,并确定使系统稳定的Kg值范围。
时,绘制系统的根轨迹,并确定使系统稳定的Kg值范围。
一个单位负反馈系统的开环对数辐频渐近特性曲线如图2-5-39所示,要求:

①写出系统开环传递函数;
②判断闭环系统的稳定性;
③将幅频向右平移10倍频程,试讨论对系统阶跃响应的影响。
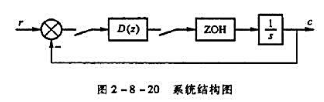
系统的结构图如图2-8-20所示,采样周期T=1s, 试设计控制器的脉冲传递函数D(z),使该系统在输入为单位阶跃信号时,输出满足以下条件:c(0)=0,c(k)=1,k>0,其中k为正整数。
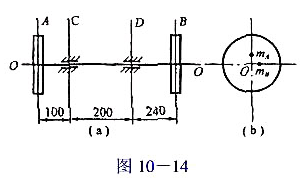
 .它们偏心方向线夹角如图(b)所示为90°.该轴由C和D两轴承支承,相对距离如图(单位:mm).今若允许在某一回转面E内回转半径为10mm处加一平衡质量,使整个回转件达到静平衡,且今轴承D所受的动反力最小.试求:
.它们偏心方向线夹角如图(b)所示为90°.该轴由C和D两轴承支承,相对距离如图(单位:mm).今若允许在某一回转面E内回转半径为10mm处加一平衡质量,使整个回转件达到静平衡,且今轴承D所受的动反力最小.试求:(1)平面E中所加平衡质量mE的大小和其偏心方向线相对A的偏心方向间的夹角 EA;
EA;
(2)平面E相对圆盘A的轴向距离dAE;
(3)当转轴转速为3000r/min时,试比较加平衡质量前、后轴承D所受动反力的大小.并指出消除此动反力的办法.
一个稳定的二阶线性定常系统,通过实验得到如下一些信息:
(1)输入信号为sin5t时,系统的稳态输出为
(2)输入信号为单位阶跃函数时,系统的稳定输出y(∞)=5;
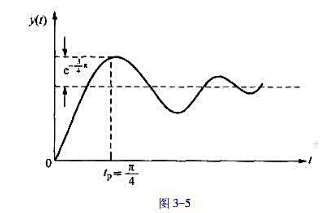
(3)将信号sin5t通过一个积分环节加到系统输入端,系统的响应如图3-5所示,试求系统的传递函数G(S)。
如图所示.A为原图,以下哪一个图为执行抽出滤镜后的结果.

A.如图B所示——得到轮廓选区
B.如图C所示——得到被选择的图形和透明背景
C.如图D所示——得到被选择的图形和背景色(比如白色)
D.以上都不是,得到新的Alpha通道