题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
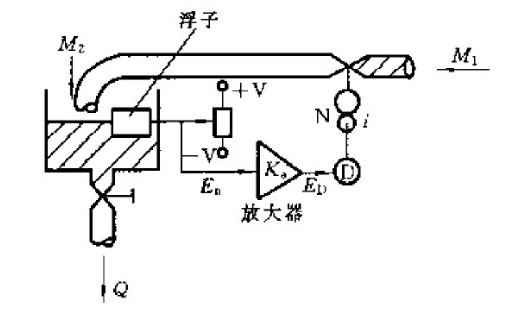
下图所示为一液面控制系统。图中Ka为放大器的增益,D为执行电机,N为减速器。试分析该系统的工作原理,并在系统
下图所示为一液面控制系统。图中Ka为放大器的增益,D为执行电机,N为减速器。试分析该系统的工作原理,并在系统中找出控制量、扰动量、被控制量、控制器和被控对象。若将此自动控制系统改变为人工控制系统,试画出相应的系统控制方框图。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
下图所示为一液面控制系统。图中Ka为放大器的增益,D为执行电机,N为减速器。试分析该系统的工作原理,并在系统中找出控制量、扰动量、被控制量、控制器和被控对象。若将此自动控制系统改变为人工控制系统,试画出相应的系统控制方框图。
如果结果不匹配,请 联系老师 获取答案
 更多“下图所示为一液面控制系统。图中Ka为放大器的增益,D为执行电…”相关的问题
更多“下图所示为一液面控制系统。图中Ka为放大器的增益,D为执行电…”相关的问题
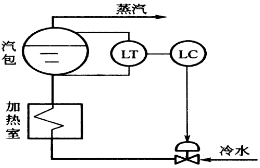
图7-6所示为一锅炉汽包液位控制系统的示意图,要求锅炉不能烧干。试画出该系统的方块图,判断控制阀的气开、气关型式,确定控制器的正、反作用,并简述当加热室温度升高导致蒸汽蒸发量增加时,该控制系统是如何克服扰动的?
对下图所示的状态空间图进行A"算法搜索。(图中A为初始节点,F为目标节点,各节点的启发值标注在小括号内)。给出搜索过程及搜索出的最佳路径,并标注各节点的估价函数值。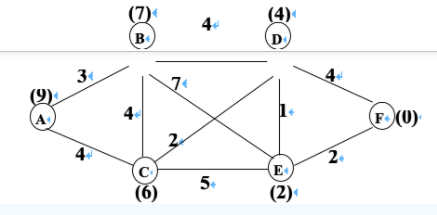
有一输水管系统如下图所示,出水口处管子直径为Φ55x2.5mm,设管路的压头损失为16u²/2(u指出水管的水流速,未包括出口损失)。求水的流量为多少m3/h?由于工程上的需要,要求水流量增加20%,此时,应将水箱的水面升高多少m?假设管路损失仍可以用16u²/2(u指出水管的水流速,未包括出口损失)表示。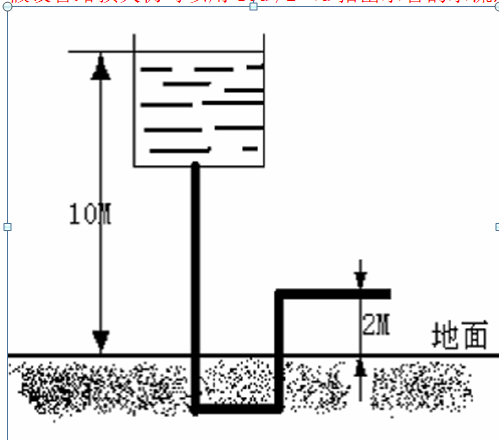
如下图所示为一附合水准路线等外水准测量成果示意图,BMA、BMB为已知水准点,其高程分别为HA=49.700m,HB=46.**0m,**代表你学号的末2位(例如,你学号末2位为23,则HB=46.230m),各测段的高差(m)和路线长度(km)分别标注在路线的上方和下方,求待测点1、2、3的高程(精确到mm)。 点号 距离(km) 高差(m) 改正数(mm) 改正后高差(m) 高程(m) BMA 49.700 1 2 3 BMB Σ 辅助计算:
点号 距离(km) 高差(m) 改正数(mm) 改正后高差(m) 高程(m) BMA 49.700 1 2 3 BMB Σ 辅助计算:
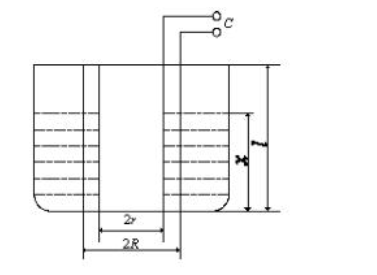
⑴液面高度X与电容C的关系;
(2)液位计的灵敏度S=dC/dx,并分析X与C是否是线性关系。
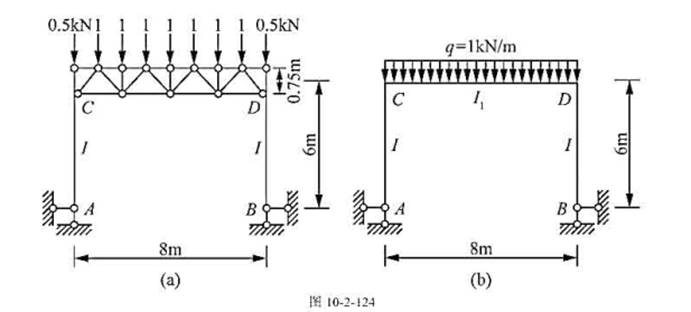
图10-2-124(a)所示为一组合结构、所架各杆裁面面积都为A(单位为m).横梁组合截面的惯性短I1=2A×(0.75/2)2=0.28A(单位为m4).试问此组合结构是否可取图10-2-124(b)所示刚架作为计算简图?并将二者的计算结果加以比较.